LMEC-7 პოლის ქანქარა
LMEC-7პოლის ქანქარა
ექსპერიმენტები
1. თავისუფალი რხევა – ბალანსის ბორბლის θ ამპლიტუდასა და თავისუფალი რხევის პერიოდს T შორის შესაბამისობის გაზომვა
2. დემპინგის კოეფიციენტის β განსაზღვრა.
3. იძულებითი ვიბრაციების ამპლიტუდა-სიხშირული მახასიათებლის და ფაზა-სიხშირული მახასიათებლის მრუდების განსაზღვრა.
4. სხვადასხვა დემპინგის იძულებით ვიბრაციებზე გავლენის შესწავლა და რეზონანსული მოვლენების დაკვირვება.
5. ისწავლეთ სტრობოსკოპიული მეთოდის გამოყენება მოძრავი ობიექტების გარკვეული რაოდენობის, მაგალითად, ფაზური სხვაობის დასადგენად.
ძირითადი სპეციფიკაციები
| გაზაფხულის სიჯიუტის ფაქტორი K | თავისუფალი ვიბრაციის პერიოდის 2%-ზე ნაკლები ცვლილება |
| დროის გაზომვა | სიზუსტე 0.001 წმ, ციკლის გაზომვის შეცდომა 0.2% |
| მექანიკური ქანქარა | ინდექსირების ღარებით, ინდექსირება 2°, რადიუსი 100 მმ |
| ამპლიტუდის გაზომვა | შეცდომა ±1° |
| ფოტოელექტრული სენსორი A | ორმაგი ფოტოელექტრული სიგნალების აღმოჩენა |
| ფოტოელექტრული სენსორი B | ერთჯერადი ფოტოელექტრული სიგნალების აღმოჩენა |
| ძრავის სიჩქარის (ფორსირების სიხშირის) დიაპაზონი | 30-45 ბრ/წთ და მუდმივად რეგულირებადი |
| ძრავის სიჩქარის არასტაბილურობა | 0.05%-ზე ნაკლები, რაც უზრუნველყოფს სტაბილურ ტესტირების ციკლს |
| სისტემის დემპინგი | ამპლიტუდაზე 2°-ზე ნაკლები დაშლა |
დეტალები
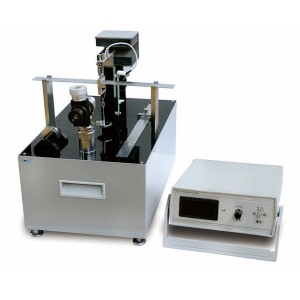
სისტემის კომპონენტები: პოლის რეზონანსული ექსპერიმენტული მოწყობილობა, პოლის რეზონანსული ექსპერიმენტული კონტროლერი, ცალკეული ფლეშ-შეკრება, 2 ფოტოელექტრული სენსორი (თითო A ტიპის და თითო B ტიპის)
პოლის რეზონანსის ექსპერიმენტული მოწყობა.
1. ზამბარის სიჯიუტის კოეფიციენტი K: თავისუფალი ვიბრაციის პერიოდის 2%-ზე ნაკლები ცვლილება.
2. დროის გაზომვა (10 ციკლი): სიზუსტე 0.001 წმ, ციკლის გაზომვის შეცდომა 0.2%.
3. სისტემის დემპინგი ელექტრომაგნიტური დემპინგის არარსებობისას: ამპლიტუდის დაშლაზე 2°-ზე ნაკლები.
4. მექანიკური ქანქარა: ინდექსირების ღარებით, ინდექსირების კუთხე 2°, რადიუსი 100 მმ.
5. ამპლიტუდის გაზომვა: შეცდომა ±1°; ამპლიტუდის გაზომვის მეთოდი: ფოტოელექტრული დეტექცია.
6. ფოტოელექტრული სენსორი A: ორმაგი ფოტოელექტრული სიგნალების აღმოჩენა; ფოტოელექტრული სენსორი B: ერთჯერადი ფოტოელექტრული სიგნალების აღმოჩენა.
7. ძრავის სიჩქარის (ფორსირების სიხშირის) დიაპაზონი: 30 – 45 ბრ/წთ და უწყვეტად რეგულირებადი.
8. ძრავის სიჩქარის არასტაბილურობა: 0.05%-ზე ნაკლები, რაც უზრუნველყოფს სტაბილურ სატესტო ციკლს.
9. ფაზური სხვაობის განსაზღვრა.
ფაზური სხვაობის განსაზღვრის ორი მეთოდი: სტრობოსკოპიული და მეტროლოგიური, ორ მეთოდს შორის 3°-ზე ნაკლები გადახრით.
მეტროლოგიური მეთოდის გაზომვის დიაპაზონი 50°-დან 160°-მდეა.
სტრობოსკოპიული გაზომვის დიაპაზონი 0°-დან 180°-მდე; განმეორებითი გაზომვის გადახრა <2°.
10. ციმციმი: დაბალი ძაბვის წამყვანი, ციმციმი ექსპერიმენტული ბლოკისგან დამოუკიდებლად, 2 მილიწამიანი უწყვეტი ციმციმის დრო, ფერი თვალისმომჭრელი წითელი.
11. ჯგუფური ექსპერიმენტების დროს დაბალი ხმაური, არანაირი დარღვევა ან დისკომფორტი.
პოლის რეზონანსის ექსპერიმენტული კონტროლერი.
1. მონაცემების შესაგროვებლად და საჩვენებლად გამოიყენება სპეციალური ექსპერიმენტული კონტროლერი; გამოიყენება დიდი წერტილოვანი მატრიცული LCD დისპლეი, ექსპერიმენტის წარმართვის მენიუებით, შენიშვნებით (ელექტრონული ინსტრუქციის სახელმძღვანელო) და ექსპერიმენტული მონაცემების საჩვენებლად და შესამოწმებლად.
2. სტრობებისთვის განკუთვნილი მართვის ინტერფეისი.